Robots have the potential to greatly assist humans in various real-world settings, but in order to do so effectively, they must be able to manipulate a wide range of objects. The development of affordable robotic grippers is crucial to enabling robots to perform dexterous object manipulation tasks. Researchers at Improbable AI Lab and MIT have recently created a new two-finger robotic gripper designed to handle everyday manipulation tasks with greater efficiency.
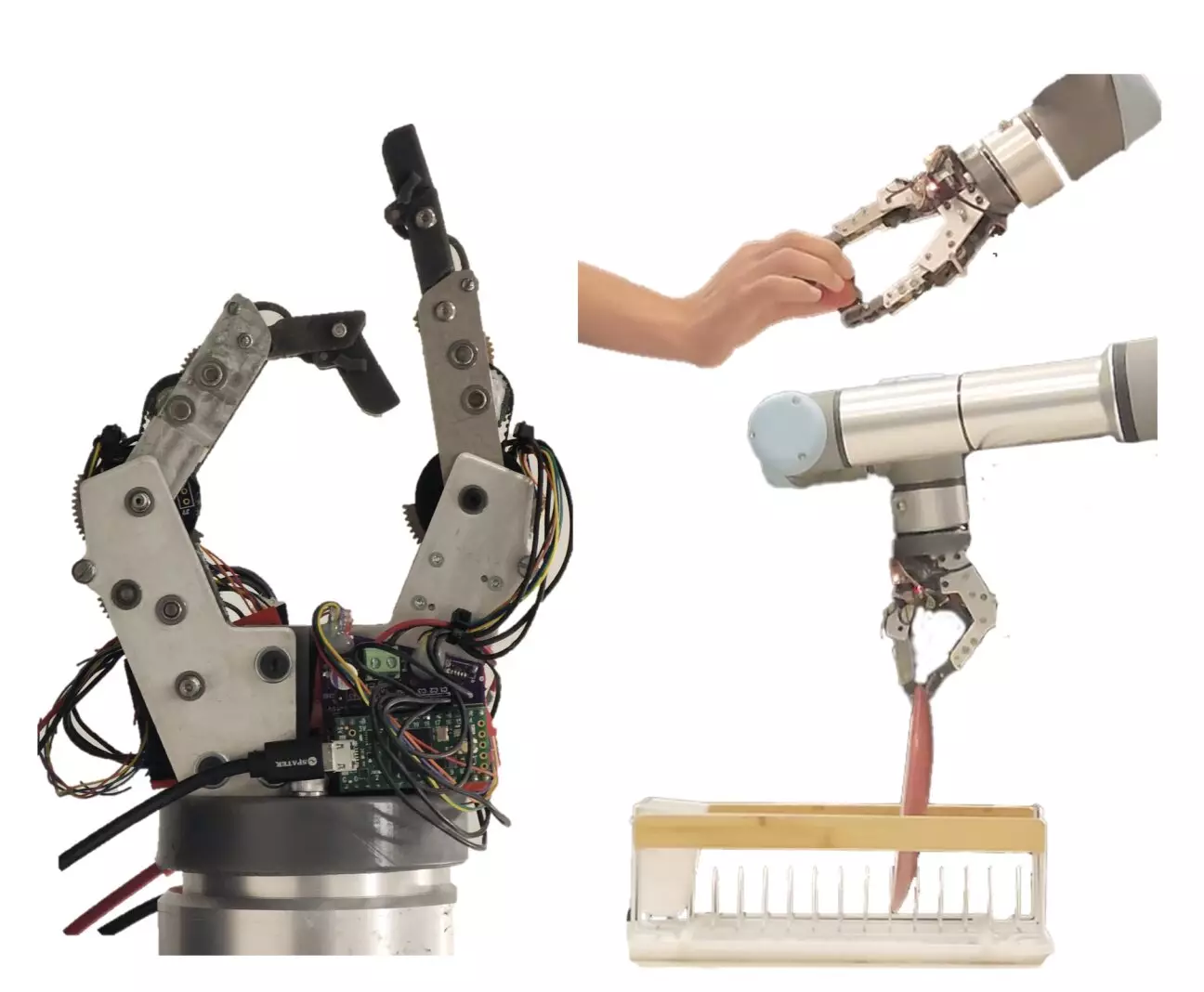
The robotic gripper developed by the researchers consists of a structure with two fingers that closely resemble human fingers in size and shape. These fingers have the ability to bend and securely grasp objects, allowing the robot to pick up items of different shapes and textures and place them in specific locations. The team’s focus was on designing fingers that could perform simple daily tasks, rather than complex manual activities.
Although the current gripper only has 2 degrees of freedom, the researchers hope to develop grippers with more fingers in the future. They acknowledge the challenges of fitting more fingers onto a hand without increasing its size significantly. However, they believe that implementing additional degrees of freedom in the gripper could enhance its functionality and versatility.
To evaluate the performance of their two-finger gripper, the researchers conducted a series of real-world experiments. These tests assessed the gripper’s speed, compliance, and the force it exerted on objects while carrying out basic pick-and-place tasks. The results of these experiments were promising, with the gripper successfully completing all tasks, including handling delicate objects like strawberries.
While the tasks tested may seem basic, they are representative of activities that humans engage in on a daily basis. The successful performance of the two-finger gripper in these tests indicates its potential for use in the development of household robots. With further refinement and testing, the researchers hope to expand the capabilities of the gripper and evaluate its performance across a broader range of daily tasks.
The development of robotic grippers such as the two-finger design created by the researchers at Improbable AI Lab and MIT represents a significant step forward in enabling robots to assist humans in everyday settings. By focusing on simplicity and functionality, the researchers have laid the groundwork for the future evolution of robotic systems capable of performing a variety of tasks efficiently and effectively.
Leave a Reply