Over the past few decades, robots have revolutionized numerous industries, most notably the automotive sector, where they have streamlined production and enhanced efficiency. However, as we continue to explore innovative applications for robotics—particularly in logistics and hazardous environments—it becomes increasingly clear that current robotic technologies face significant limitations. Most robots today are designed to perform a narrow range of tasks, often repeating a fixed series of actions with little room for adaptation or error recovery. To unlock the vast potential of robotic systems, it is imperative to develop machines that can mimic human-like skills, including quick physical interactions, spatial awareness, and dynamic adaptability to ever-changing circumstances.
Insights from Cutting-Edge Research
Eindhoven University of Technology has made notable strides in advancing the field of robotics. Recent insights from Alessandro Saccon, an Associate Professor specializing in nonlinear control and robotics, highlight a particularly novel initiative: the I.AM project. This groundbreaking research specifically targets the enhancement of robots’ capabilities in fast physical interactions. Saccon emphasizes the need for robots that are not merely reactive but rather proactive, able to predict and adapt to the dynamics of their environment—especially when interacting with heavy objects.
One intriguing implication of Saccon’s research is the recognition that some tasks are inherently unsuitable for human workers, whether due to safety concerns or physical limitations. For instance, robots can play a crucial role in high-risk scenarios such as luggage handling at airports, working in hazardous nuclear sites, or managing disaster response situations. The unique challenges posed by these environments underline the importance of developing robots that can operate quickly and reliably, even when faced with unexpected variables.
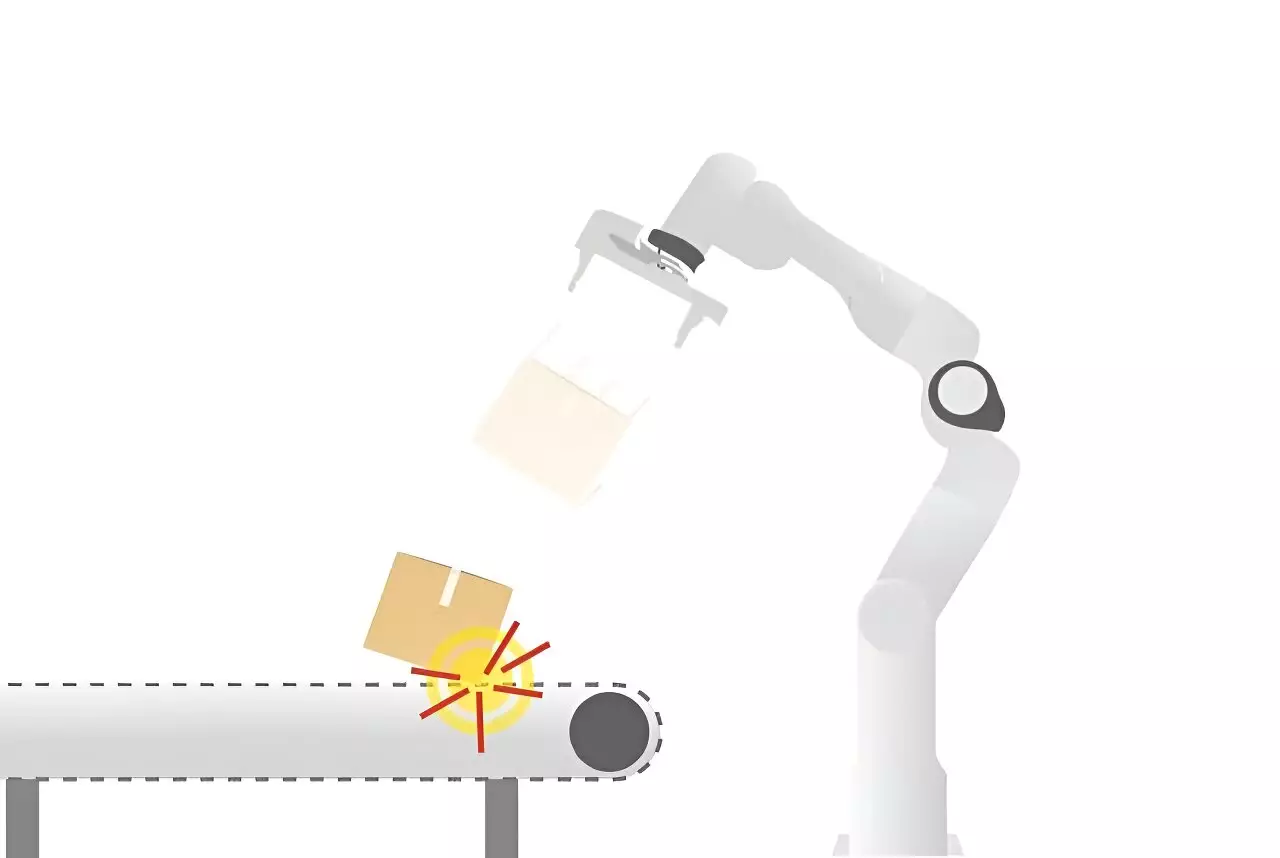
A fundamental shift in robotics research is underway, where the focus has turned from collision avoidance to what Saccon refers to as “collision exploitation.” While traditional robotics predominantly prioritize steering clear of collisions, the I.AM project investigates how robots can engage in deliberate, controlled interactions with their environments. This approach offers exciting possibilities, particularly for applications that require robots to pick up heavy objects rapidly and efficiently, despite uncertainties imposed by system inaccuracies or unforeseen disturbances.
The alchemy of effective robotic control resides in the development of algorithms that respect impact dynamics and allow for rapid, reliable execution of tasks. Saccon’s team employed principles of physics—including mass, friction, and real-time measurements—to create a feedback loop that integrates theoretical models with real-world data. This iterative process of simulation and evaluation fosters an understanding of how robots can adapt their movements in the face of unpredictability.
As the research progresses, an appreciation for the intricacies of human movement and spatial perception emerges. Humans can seamlessly navigate complex environments, making real-time decisions with ease, a capability that remains largely elusive within the realm of robotics. Saccon and his peers are confronting the grand challenge of translating these natural skills into robotic systems, with a particular focus on real-time environmental understanding and rapid decision-making. This endeavor requires not only advanced hardware but also a nuanced grasp of spatial dynamics, a dimension that many robots still struggle to master.
Through collaborations with industry leaders like VanderLande, a prominent logistics process automation company, the I.AM project has garnered valuable insights, blending academic rigor with practical applicability. By engaging in hands-on testing and sharing resources, the collaboration has facilitated the development of innovative solutions to operational bottlenecks in logistics, laying the groundwork for more efficient robotic applications.
The landscape of robotics is evolving rapidly, with a concerted effort to improve impact-aware technologies gaining momentum. As Saccon’s work demonstrates, the prospect of creating robots capable of dynamic interaction with their environments is not just a theoretical aspiration but a tangible goal. Continued funding and international collaboration promise further advancements in this field, pushing the boundaries of what robots can achieve.
The advancements articulated by Saccon and his team signal a shift towards a future where robots can integrate seamlessly into logistical processes and hazardous environments, enhancing safety and efficiency. Emerging opportunities abound, and the excitement surrounding these innovations is palpable. While challenges remain, the dedication to exploring rapid planning and perception ensures that the journey toward sophisticated, impact-aware robotics is just beginning. The future holds great promise, and it is integral that the robotics community remain engaged and proactive in driving this vision forward.
Leave a Reply