Soft robotics is an innovative field that promises not only to enhance the functionality of machines but also to make them safer for human interaction. A recent breakthrough in designing fabric-based soft pneumatic actuators (FSPAs) has emerged from a study published in *Scientific Reports*. This research reveals how the mathematical principles behind natural patterns, specifically Turing patterns, can revolutionize the creation of these flexible devices, paving the way for versatile applications in robotics.
Generalizing their functionality, FSPAs are soft, flexible actuators that react to pneumatic pressure changes, enabling them to perform movements such as bending, twisting, and stretching. Unlike traditional rigid mechanical systems, these soft actuators exhibit a safety advantage for human-robot interaction and are less likely to damage delicate objects. Their lightweight nature makes them ideal for applications including wearable technology, adaptive architecture, and assistive devices for individuals with disabilities or mobility challenges. However, despite their potential, the design and manufacturing processes for FSPAs present notable challenges that have hindered their widespread use.
Addressing Design Challenges through Automation
The research team, led by Dr. Masato Tanaka and Dr. Tsuyoshi Nomura from Toyota Central R&D Labs, and Dr. Yuyang Song from Toyota Motor Engineering in North America, was motivated by the recognized need for more accessible and effective solutions in soft robotics. Dr. Tanaka emphasized that the goal of their research was to create pneumatic actuators that are not only simple and cost-effective but also capable of controlled, shape-morphing movements without relying on complex materials.
To achieve this, they turned to Alan Turing’s theory of morphogenesis, which describes how natural patterns emerge from uniform states. Turing patterns, derived from reaction-diffusion equations, manifest as striking, stable formations found in nature, like the stripes of a zebra. The team’s approach incorporated these patterns into the design of FSPAs, fundamentally enhancing their capabilities.
Employing Turing patterns required a sophisticated understanding of interplay between different materials. By using gradient-based orientation optimization, the team was able to define how the material’s fibers would be aligned across the actuator’s surface. This innovative approach allowed for anisotropic behavior, whereby the material displays varying properties across different orientations. Such anisotropic features are critical for achieving controlled deformations that are predictable and efficient.
To develop the surface texture of the FSPAs, the researchers employed mathematical modeling of anisotropic reaction-diffusion systems. They converted optimization results into specific surface patterns that guide the actuator’s movement when air pressure is applied. This method, combining mathematical rigor with practical application, ensures the actuator performs as intended, overcoming previous limitations of traditional isotropic materials that lacked directionality in their deformation behavior.
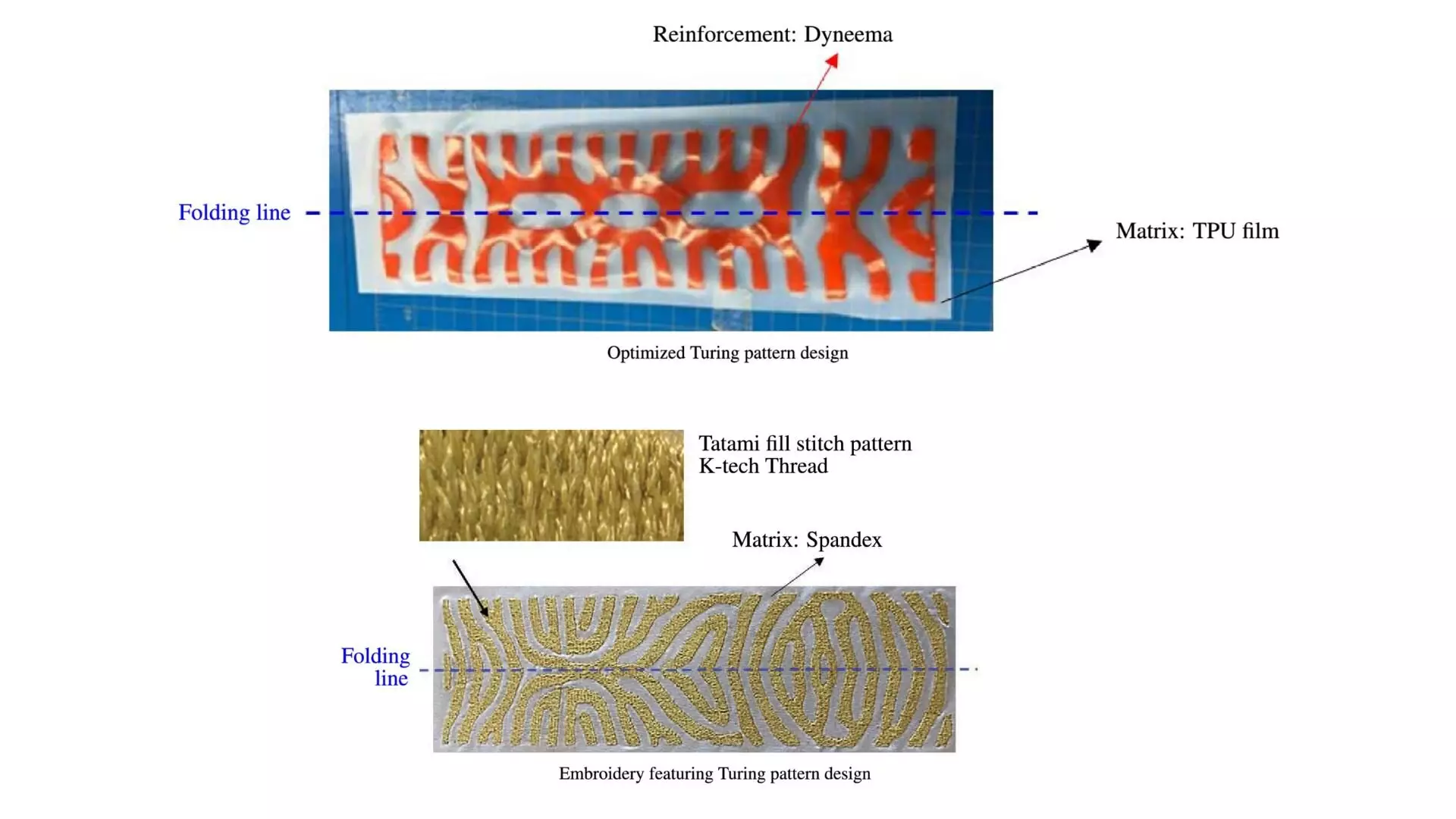
The success of the design hinges not only on the theoretical framework but also on practical implementation and fabrication. The team explored two prominent techniques: heat bonding and embroidery. In the heat bonding process, they laser-cut designs from a rigid fabric like Dyneema and then thermally attach it to a softer base material like TPU film. This combination allows for varied stiffness across the actuator, enhancing functional versatility.
The embroidery method embeds Turing patterns directly into softer textiles using stiffer threads, facilitating distinct stiffness zones that contribute to better control over the actuator’s movements. Both techniques presented advantages in scalability and cost-effectiveness, presenting practical pathways to bring FSPAs into wider usage.
Comparative tests against classical designs yielded promising results, with Turing pattern-derived actuators outperforming their predecessors in certain movements such as C-shaped bending and showing similar performance for other tasks, like twisting. One noteworthy outcome was the reduction in distance between actuator edges by approximately 10% with the new designs.
Looking ahead, the research team is excited about the potential for integrating Turing patterns with advanced materials such as shape memory alloys and electroactive polymers. These innovations could lead to FSPAs with enhanced dynamic capabilities. Furthermore, scalability remains a significant area of interest, particularly regarding mass production methods like 3D printing and automated weaving, which could enhance both efficiency and precision in actuator manufacturing.
The intersection of mathematics with fabric design and robotics represents a frontier filled with potential. As researchers continue to build on the foundations of Turing’s theoretical work, the field of soft robotics stands poised for exciting developments that could reshape industries and improve lives across the globe.
Leave a Reply