In an era where artificial intelligence (AI) is continuously redefining boundaries, the challenge of replicating human dexterity in robotics remains a prominent hurdle. While humans can easily reach for a book on a shelf without giving it much thought, for robots, this seemingly simple act requires complex algorithms and extensive programming to navigate around obstacles. The Robotics Institute at Carnegie Mellon University (CMU) has made significant strides in this area with the development of a groundbreaking approach known as Neural Motion Planning, which aims to enhance a robot’s ability to navigate unfamiliar environments dynamically.
Motion planning encompasses the algorithms that guide robots as they engage in physical tasks, such as retrieving an item from a cluttered shelf. Unlike humans who can instinctively adapt their movements based on immediate feedback from their surroundings, traditional robotic systems often rely heavily on pre-defined paths and comprehensive maps of the environment. This reliance comes with limitations as these older models tend to break down in unpredictable settings, where obstacles can appear at any moment, necessitating real-time adjustments. Notably, generating solutions for these complex movements can be a time-consuming process, requiring extensive collision detection operations that can slow down the robot’s response time significantly.
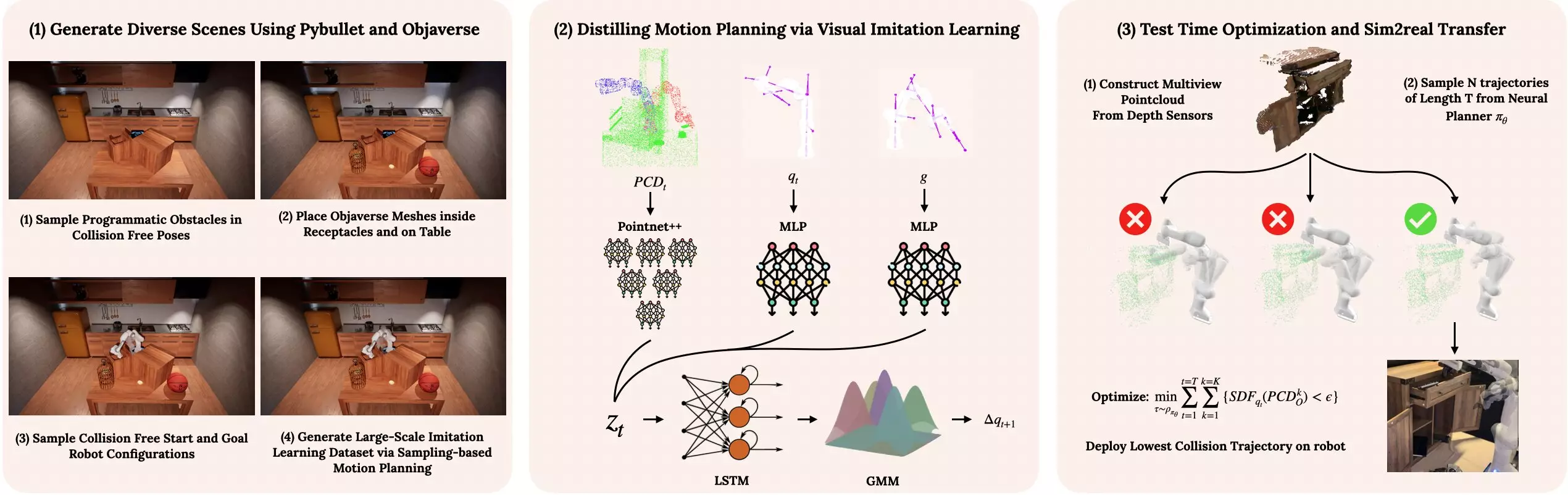
What distinguishes Neural Motion Planning from conventional methods is its innovative application of a singular, robust AI network that draws insights from vast data sets. This data-driven methodology allows robots to execute motion planning tasks across diverse and unstructured environments effectively. By simulating millions of scenarios, the researchers trained this model using various household objects and conditions, preparing the robot to manipulate items under dynamic situations where traditional motion planning methods might falter.
The reason for this leap is grounded in an understanding of human learning patterns. Much like people who advance from tentative to swift actions as they become more proficient at a task, Neural Motion Planning enables robots to evolve their capabilities over time. When a robot is tasked with maneuvering in an unknown environment—such as a kitchen littered with pots, pans, and appliances—it can draw on its extensive training to make informed decisions and navigate obstacles proficiently, performing tasks more effectively than ever before.
Central to the success of Neural Motion Planning is the extensive simulation work that informed its development. By exposing the robot to a variety of household environments—complete with random obstructions like pets or decorative items—researchers were able to cultivate a sophisticated understanding of spatial awareness. As a result, the model evolves into a powerful system capable of making on-the-fly adjustments, similar to how humans interact with their surroundings. This extensive training process emphasizes the importance of generalized learning, as it enables the robotic arm to leverage insights from all prior experiences, even in new and unforeseen circumstances.
The real-world applicability of Neural Motion Planning is evidenced by successful trials on robotic arms in lab settings. These systems operate with 3D visualizations created from depth camera data, allowing precise relocations based on a designated endpoint. As the robotic arm deftly maneuvers around common household obstacles, it demonstrates the potential for practical applications in domestic robotics, aiding in tasks from simple retrieval to complex organizational duties.
Deepak Pathak, an assistant professor at the Robotics Institute, highlights the groundbreaking nature of this research, stating that while significant advancements have been made in other fields like natural language processing and visual understanding, robotics is only beginning to tap into similar potential. As research continues, Neural Motion Planning represents a significant stepping stone towards realizing more capable and adaptive robots that seamlessly integrate into our daily lives.
Carnegie Mellon University’s Neural Motion Planning showcases the innovative integration of AI in robotics, aspiring to overcome the innate challenges of maneuvering in unpredictable environments. Through thorough simulation and data-driven methodologies akin to human learning processes, this approach not only enhances the versatility of robots but also holds promise for a future where intelligent machines can autonomously navigate and perform tasks that require an understanding of complex physical spaces. As technology advances, the potential of robotics will continue to expand, reshaping the way we envision interactions between machines and our everyday lives.
Leave a Reply