Roboticists around the world have been working tirelessly to design robotic grippers that are capable of efficiently picking up and manipulating various objects. While many grippers are inspired by human hands and perform well in real-world tasks, they often come with complex mechanisms that make them expensive and difficult to control. This can hinder their widespread use in developing energy-efficient and cost-effective robots. However, researchers from Purdue University and MIT have recently introduced a simpler yet equally effective robotic gripper that could bridge this gap.
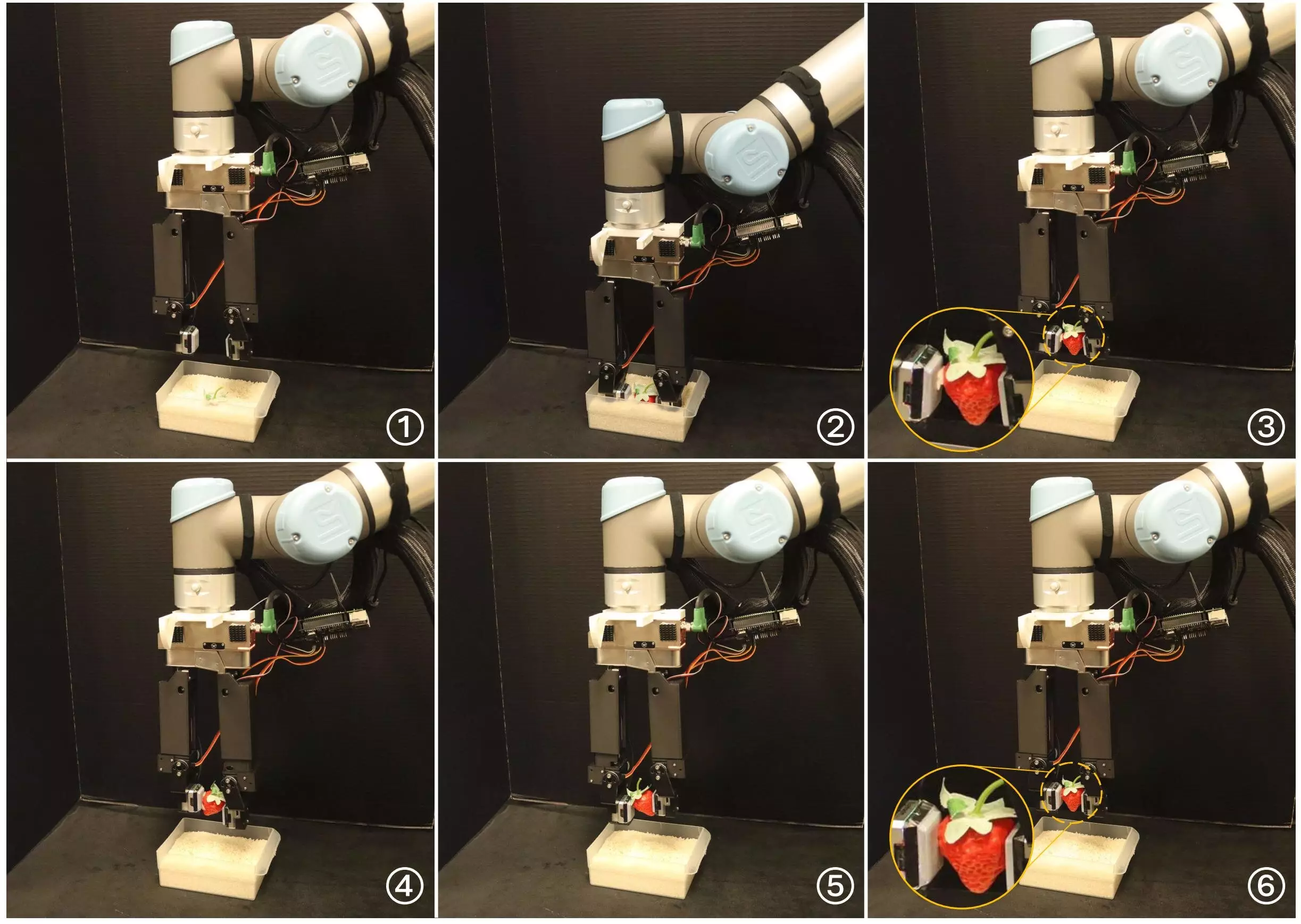
The newly developed robotic gripper has only 5 degrees of freedom (DOF), making it easier to control through programming tools. Despite its simplicity, the gripper is able to perform intricate in-hand manipulation tasks similar to human hands. It relies on sensory data from an integrated vision-based tactile sensor, allowing it to grasp and manipulate objects with precision. This innovative gripper consists of two fingers attached to a gripper-base, with each finger equipped with a linear actuator and a rotational servo motor to achieve the necessary movements.
One of the key features of this gripper is its ability to combine its 5 DOF to achieve a high level of dexterity during in-hand manipulation tasks. Through a series of real-world experiments, the research team demonstrated that the gripper could successfully complete tasks such as singulation and scooping. It could mimic human motions like rubbing away sand particles between objects, showcasing its versatility and effectiveness in handling complex manipulation tasks. The gripper’s reduced complexity also simplifies controller design and makes it a more cost-effective and energy-efficient solution for robotic applications.
The potential applications of this new robotic gripper are vast, as it could be further developed and applied to a wide range of complex object manipulation tasks. Its simple yet effective design could serve as inspiration for the creation of other cost-effective and efficient robotic systems. The research team is now focused on pushing the boundaries of the gripper’s capabilities by tackling even more challenging manipulation tasks that were previously considered beyond reach. Ultimately, the development of this tactile gripper could revolutionize the field of robotics and pave the way for more accessible and practical robotic solutions.
Leave a Reply