In a recent groundbreaking development, researchers from the Max Planck Institute for Intelligent Systems, Harbin Institute of Technology, and Hong Kong University of Science and Technology have introduced a new wireless miniature robot designed to navigate through pipes and tubular structures. This innovative robot eliminates the need for external power sources, making it more versatile and applicable to a wide range of maintenance tasks in various industries.
Traditionally, maintenance robots have been limited by their reliance on external power sources, which restrict their operational range and potential applications. Many existing robots are larger in size, have limited battery life, and offer fewer functionalities compared to their power-reliant counterparts. This new wireless millimeter-scale robot aims to address these limitations by incorporating an internal power source and an efficient actuation unit.
The Key Components of the Wireless Millirobot
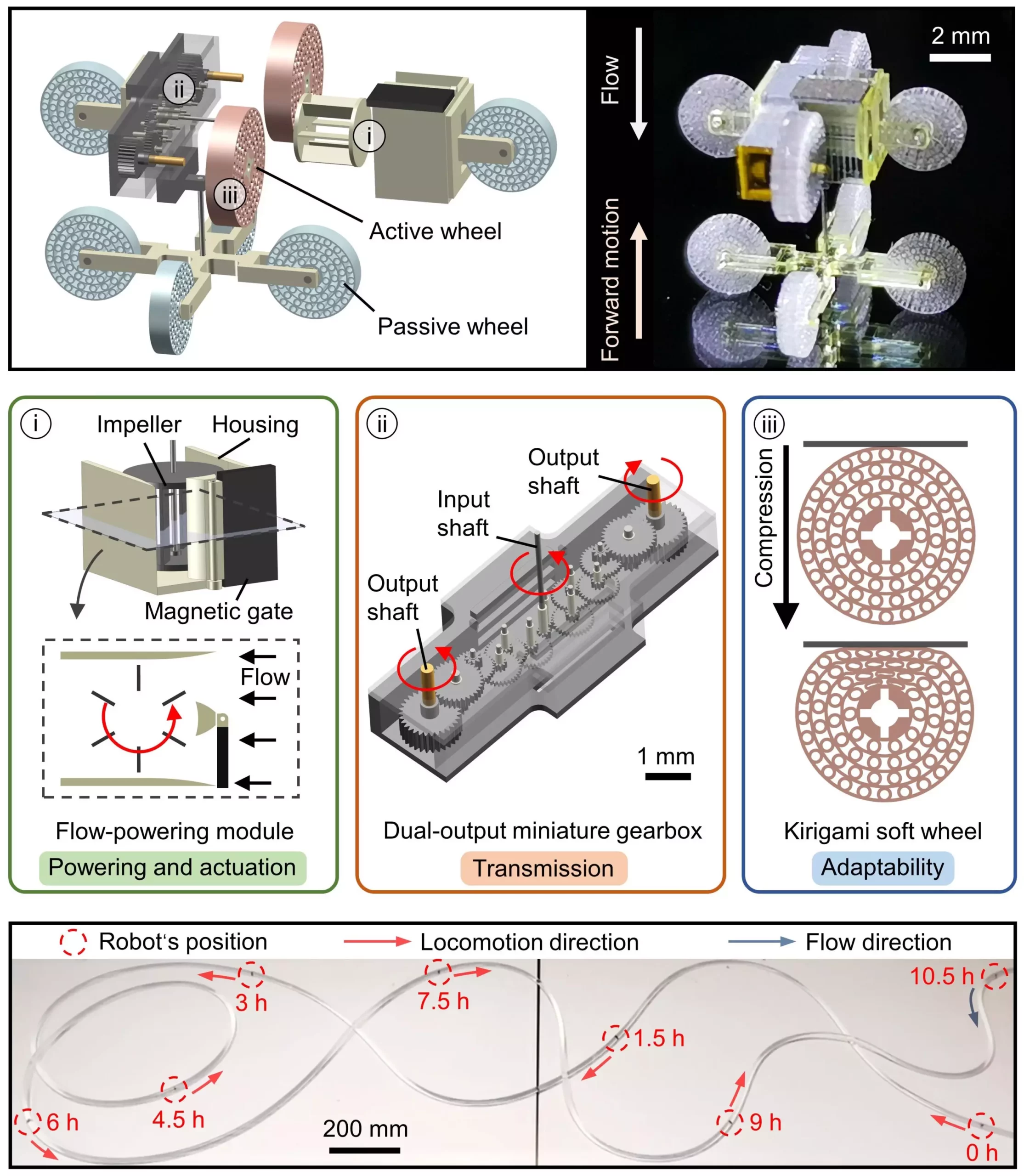
The wireless millimeter-scale robot developed by the researchers consists of three key components: a flow-powering module, a dual-output miniature gearbox, and kirigami soft wheels. The flow-powering module allows the robot to utilize flow power from fluids in tubular structures, while the gearbox converts this mechanical energy into locomotion. The soft wheels provide adaptive locomotion in complex tubes, enabling the robot to navigate through challenging environments with ease.
This innovative robot opens up a world of possibilities for maintenance tasks in industries such as nuclear, industrial, and medical applications. By eliminating the need for external power sources, the robot can cover longer distances within tubular structures and perform routine maintenance tasks for extended periods without running out of energy. Its ability to modulate direction with an external magnetic field enhances its versatility and functionality in various environments.
The researchers conducted preliminary tests to evaluate the performance of the wireless millimeter-scale robot, and the results were promising. As they continue to enhance the robot’s capabilities and stability, they aim to prepare it for deployment in real-world settings. Ensuring stable locomotion in tubes with high flow rates or low-friction surfaces presents a challenge that the researchers are actively working to address.
Future Developments and Deployments
Future studies will focus on optimizing the robot’s design to improve its performance in different environments and applications. By streamlining the robot body to minimize flow resistance or adding microstructures to the wheel surfaces, the researchers aim to enhance its stability in challenging conditions. Additionally, expanding the range of motion by increasing the working distance of external magnetic fields will further enhance the robot’s capabilities for long-distance navigation.
The development of a wireless millimeter-scale robot marks a significant advancement in the field of maintenance robotics. By leveraging internal power sources and innovative design features, this robot has the potential to revolutionize maintenance tasks in a wide range of industries. As researchers continue to refine its design and capabilities, the future looks bright for the deployment of these robots in real-world scenarios.
Leave a Reply