Robotic systems have proven to be highly beneficial in various indoor settings, assisting with manual tasks and providing information to users. However, when it comes to outdoor environments that are unknown and unmapped, the challenges faced by robots increase significantly. Obstacles that can occlude sensors pose a risk of collisions, making it difficult for robots to navigate effectively in such complex settings.
Air-ground robots have the potential to revolutionize operations in outdoor environments by combining the capabilities of both ground-based and aerial systems. These robots could play a crucial role in tasks such as searching for survivors in natural disasters, delivering packages to remote locations, and monitoring natural environments. The versatility and mobility of air-ground robots make them highly suitable for tackling complex missions in challenging outdoor settings.
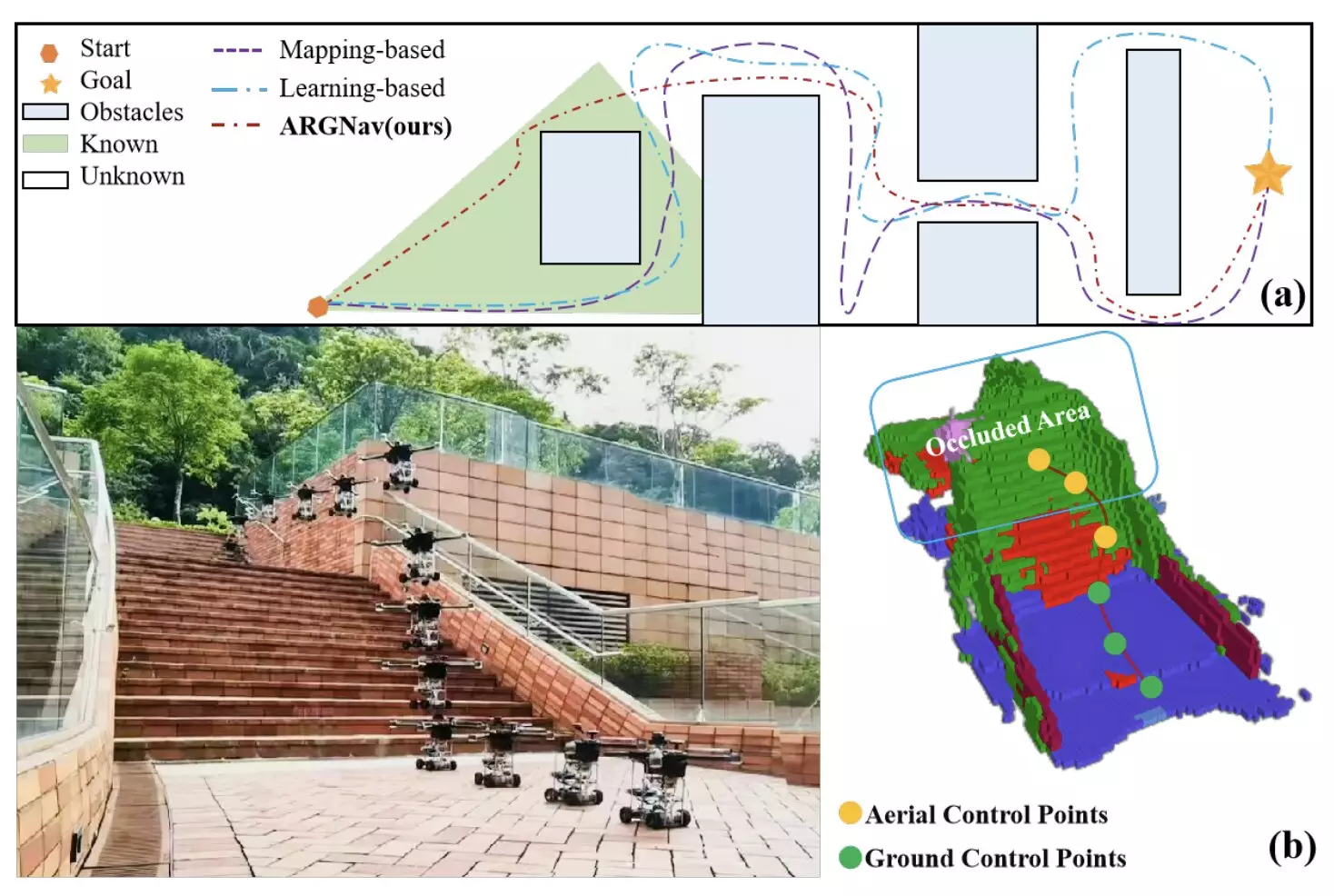
Researchers at the University of Hong Kong have recently introduced a new framework called AGRNav, which aims to enhance the autonomous navigation of air-ground robots in occlusion-prone environments. This framework consists of two main components: a lightweight semantic scene completion network (SCONet) and a hierarchical path planner. The SCONet component utilizes deep learning to predict obstacles in the environment accurately, while the path planner plans energy-efficient paths for the robot based on these predictions.
The primary goal of the AGRNav framework is to enable air-ground robots to navigate safely and efficiently in environments where obstacles may be occluded by other objects. By using a combination of obstacle prediction and path planning, the framework helps the robot to avoid collisions and reach its destination in an optimal manner. The researchers have demonstrated the effectiveness of the framework through simulations and real-world experiments, showcasing its superiority over existing navigation methods.
One of the key advantages of the AGRNav framework is that its underlying code is open-source, allowing developers worldwide to access and modify it for their specific needs. By making the framework available on platforms like GitHub, the researchers aim to encourage collaboration and further development in the field of air-ground robotics. This open-access approach could lead to the deployment of the framework on various robotic platforms, enhancing their navigation capabilities in real-world scenarios.
The development of the AGRNav framework represents a significant step forward in the field of air-ground robotics. By addressing the challenges of navigating complex environments with occluded obstacles, the framework opens up new possibilities for using robots in outdoor settings. With further research and testing, the AGRNav framework could pave the way for the effective deployment of air-ground robots in a wide range of applications, bringing us closer to a future where robotic systems play a vital role in outdoor operations.
Leave a Reply