The concept of self-driving vehicles has long been a goal for both robotics research and the automotive industry. While companies have been investing in autonomous vehicles, the deployment of such technology has been limited. Researchers have recently delved into the realm of “automated valet parking” (AVP), which allows a vehicle to navigate from the entrance of a parking lot to an available parking spot. One such advancement in this field is the development of OCEAN, an Openspace Collision-freE trAjectory plaNner for autonomous parking, by researchers at Mach Drive in Shanghai.
The OCEAN planner was introduced in a paper pre-published on arXiv and aims to enhance the ability of vehicles to safely reach a parking spot without colliding with obstacles in their path. This optimization-based trajectory planner, accelerated by the Alternating Direction Method of Multiplier (ADMM), is designed for scenes with minimal dynamic obstacles. OCEAN was specifically created to address the shortcomings of previous approaches to autonomous parking, including inaccurate collision prediction and poor real-time performance.
Key Features of OCEAN
The OCEAN planner is built upon a hierarchical optimization-based collision avoidance framework, which allows for a smooth and convex dual form of collision avoidance trajectory planning. By splitting optimization variables into separate groups for efficient problem-solving, ADMM sub-problems are formulated as Quadratic Programming (QP), Sequential Quadratic Programming (SQP), and Second Order Cone Programming (SOCP) problems. This unique approach significantly improves the planner’s ability to avoid collisions, while enhancing its real-time performance and robustness.
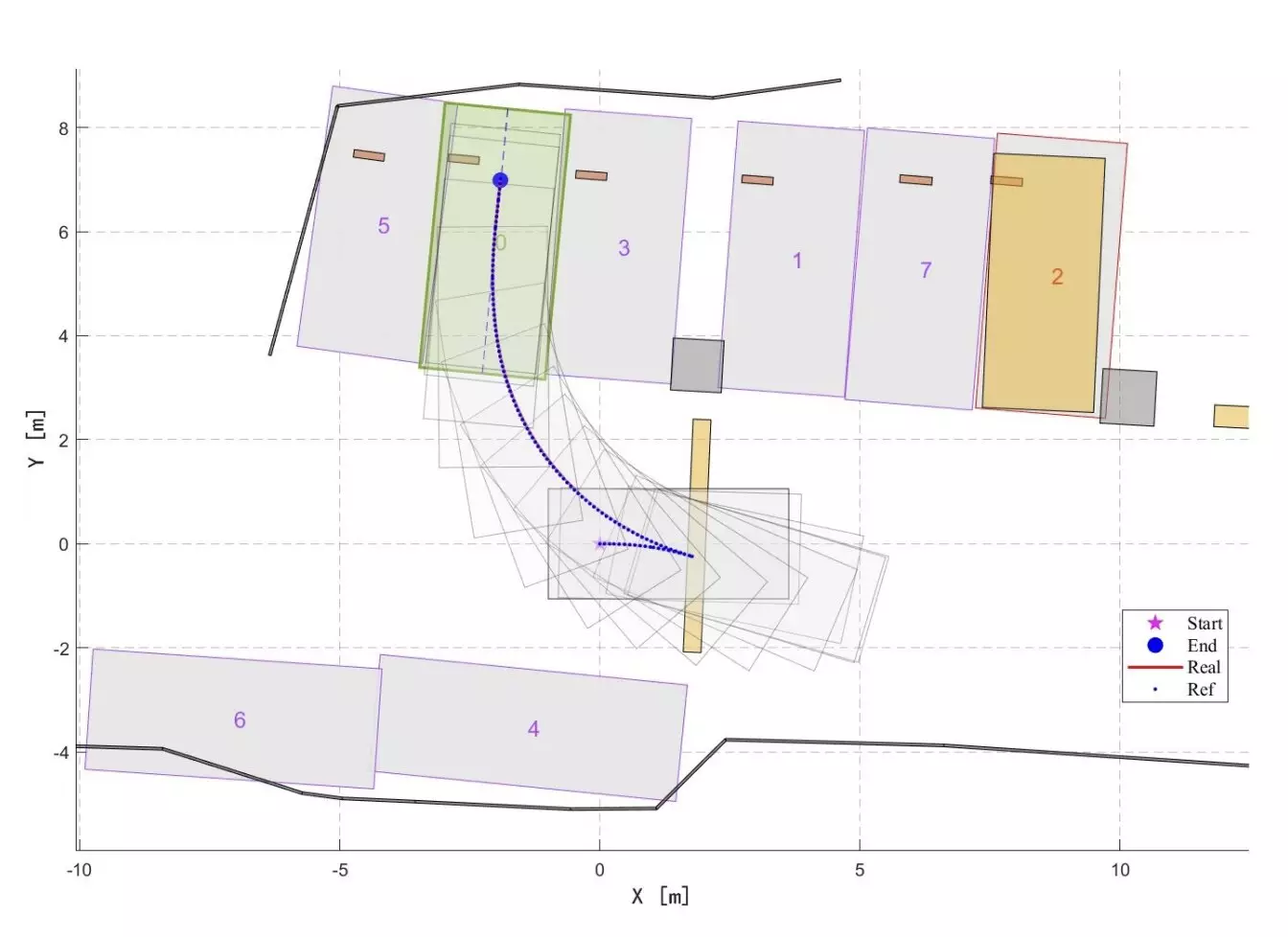
Researchers conducted extensive testing of the OCEAN planner through simulated scenarios and real-world experiments in public parking areas. The results were promising, showing that OCEAN outperformed various methods for autonomous parking applications. The planner demonstrated superior system performance compared to existing benchmarks, making it suitable for deployment on low computing power platforms that require real-time capabilities.
Future Prospects
While the OCEAN planner has shown great potential, there is still room for improvement and further real-world testing. In the future, automotive companies may consider integrating this technology into their vehicles to advance the development of automated vehicle parking systems. The introduction of OCEAN could revolutionize the way vehicles navigate parking lots, offering enhanced safety and efficiency for drivers.
The development of the OCEAN planner represents a significant advancement in the field of automated valet parking. Through its innovative design and robust performance, OCEAN has the potential to shape the future of autonomous parking technologies in the automotive industry.
Leave a Reply